Arbeitsplatzbeschreibung
Willkommen im Digital Factory Technologies (DFT) Labor der HTW Berlin, einem modernen Forschungs- und Lehrlabor, das sich auf innovative Technologien der digitalen Fabrik wie IoT, Augmented und Virtual Reality, Robotik sowie Industrie 4.0 konzentriert. Mit Schwerpunkten auf digitalen Zwillingen und fortschrittlicher Datenkommunikation bietet das Labor praxisorientierte Forschung und Anwendungen. Die folgenden Arbeitsplatzbeschreibungen bieten einen Einblick in die spezifischen Technologien und Anwendungsbereiche, die im DFT-Labor erforscht und entwickelt werden.
Table of contents
Robotik - Franka Emika Research Roboter
Beschreibung
Der Roboter Panda der Firma Franka Emika GmbH ist ein kollaborativer Roboterarm, der für die Zusammenarbeit mit dem Menschen entwickelt wurde. Mit dem Roboter können im DFT-Labor unterschiedliche Szenarien aus der Industrie umgesetzt und Technologien untersucht werden, wie die Mensch-Maschine-Kollaboration/-Kooperation, Datenintegration im Kontext von Industrie 4.0, Computer Vision in der Robotersteuerung und viele Weitere. Das DFT-Labor verfügt über 2 Panda-Roboter, einer mit einem 2-Backen-Parallelgreifer und einer mit einem Saugnapf zum Heben von Objekten mit glatten Oberflächen. Mit diesen beiden können ebenfalls kooperative Szenarien umgesetzt werden, wie Kollisionsfrüherkennung, M2M-Kommunikation oder Kooperation.
Der Franka Emika Research Roboter (FER) zeichnet sich durch seine hohe Präzision, Flexibilität und Benutzerfreundlichkeit aus, was ihn ideal für eine Vielzahl von Anwendungen in Forschung und Lehre macht. Mit sieben Freiheitsgraden und einer benutzerfreundlichen Steuerungssoftware ermöglicht der Forschungsroboter Franka komplexe Bewegungsabläufe und Interaktionen. Über das Franka-Control-Interface (FCI), die proprietäre Schnittstelle des Roboters, können eigene Anwendungen für Forschungs- und Entwicklungsprojekte realisiert werden. Der Franka Research Robot unterstützt somit eine innovative und praxisnahe Forschung und trägt zur Weiterentwicklung moderner Robotiklösungen bei. Eine Integration des FCI in ROS1 und ROS2 bietet eine weitere Möglichkeit der Steuerung und Integration in Robotiksysteme. Durch diese Integration können Forschende auf eine breite Palette von Softwaretools und -bibliotheken zugreifen, was die Entwicklung und Erprobung neuer Algorithmen und Anwendungen in der Robotik erheblich vereinfacht und beschleunigt.
weiterführende Informationen
Projekte

Robotik - Lara
Beschreibung
Der Roboter LARA der Firma Neura Robotics ist ein kollaborativer Leichtbauroboterarm mit 6 Freiheitsgraden, der speziell für die Zusammenarbeit mit Menschen in verschiedenen industriellen und forschungsbezogenen Anwendungen entwickelt wurde. Seit 2024 steht dieser im DFT-Labor der HTW bereit und ermöglicht die Umsetzung vielfältiger Szenarien aus der Industrie und unterstützt die Erforschung von Technologien wie Mensch-Maschine-Kollaboration, Datenintegration im Kontext von Industrie 4.0 und die Anwendung von Computer Vision in der Robotersteuerung.
Mit einem 3-Finger-Greifer ausgestattet, bietet der LARA-Roboter im DFT-Labor die Möglichkeit, unterschiedliche Greifprozesse zu analysieren und komplexe Handhabungsszenarien zu simulieren. Seine hohe Präzision, Flexibilität und Benutzerfreundlichkeit machen ihn ideal für eine Vielzahl von Anwendungen in Forschung und Lehre. Der LARA-Roboter unterstützt die Integration in moderne Robotiksysteme und erleichtert somit die Entwicklung und Erprobung neuer Algorithmen und Anwendungen. Durch diese Fähigkeiten trägt der LARA-Roboter zur Weiterentwicklung moderner Robotiklösungen bei und ermöglicht eine praxisnahe und innovative Forschung.
Projekte
VERWEISE

Fahrerloses Transportsystem - MAV
Beschreibung
Der MAV 500 der Firma Neura Robotics ist ein fortschrittliches, autonomes, mobiles Robotersystem, das speziell für intralogistische Aufgaben in Innenräumen entwickelt wurde. Der MAV kann autonom Objekte transportieren und sich frei in seiner Umgebung bewegen. Ausgestattet mit Lidar-Sensoren kann er sich mit Hilfe des SLAM-Verfahrens räumlich orientieren und definierte Routen abfahren. Zusätzlich ist der MAV mit Sicherheitszonen ausgestattet, die eine sichere Bewegung auch in dynamischen Umgebungen ermöglichen. Im DFT-Labor werden unter anderem verschiedene Steuerungsmöglichkeiten und Nachhaltigkeitsaspekte untersucht.
Projekte

Pocket NC
Beschreibung
Die Pocket NC ist eine kompakte, leistungsstarke 5-Achs-Fräsmaschine, die sich ideal für Prototyping und die Bearbeitung kleiner Bauteile eignet. Mit ihrer Präzision und Flexibilität ermöglicht sie es, komplexe Werkstücke in verschiedenen Materialien, wie Aluminium oder Kunststoff, zu fräsen. Im DFT-Labor ist die Pocket NC direkt in Teamcenter und NX von Siemens integriert. Dies erlaubt eine nahtlose Verbindung zwischen dem CAD-Modellierungsprozess und der Fertigung, sodass Studierende und Forschende den gesamten Produktentwicklungszyklus von der Konstruktion bis zur physischen Umsetzung in einem durchgehenden digitalen Prozess erleben können.
Faherloses Transportsystem - Robotino3
Beschreibung
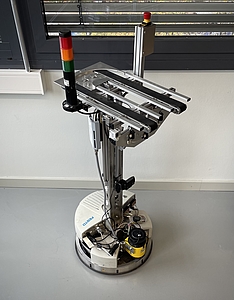
Der Robotino 3 von Festo stellt ein älteres, jedoch nach wie vor vielseitig nutzbares fahrerloses Transportsystem dar, das sich in besonderem Maße für Lern- und Testumgebungen eignet. Dank seiner Open-Source-Entwicklung bietet der Robotino 3 flexible Erweiterungsmöglichkeiten und unterstützt verschiedene Schnittstellen und Standards, wie ROS, OPC und REST. Dadurch ist er in besonderem Maße anpassungsfähig für unterschiedlichste Automatisierungsprojekte. Mit seinen vielseitigen Programmiermöglichkeiten – von C++, C#, Java bis hin zu Robotino View und Robotino Factory – kann der Roboter einfach über ein Webinterface programmiert und gesteuert werden.
Des Weiteren wurde eine Vorrichtung zur Aufnahme von Bauteilträgern inklusive weiterer Sensorik und Aktoren installiert. Zudem wurde eine Kamera installiert mit welcher Projekte wie Linienverfolgung oder Hindernisserkennung realisiert werden können. Zukünftige Entwicklungen könnten sich auf fortgeschrittene Themen wie SLAM (Simultaneous Localization and Mapping), autonomes Fahren und Sprachsteuerung fokussieren, um den Einsatz des Roboters in komplexeren industriellen Szenarien weiter voranzutreiben.
Weiterführende Informationen
Projekte
3D Drucker
Beschreibung
Die 3D-Druckstation des DFT-Labors ist mit zwei 3D-Druckern ausgestattet, die verschiedene Anforderungen an Prototyping und Kleinserienfertigung abdecken. Der Stratasys uPrint SE Plus ist ein leistungsfähiger 3D-Drucker, der auf der FDM-Technologie basiert und für das Drucken robuster Prototypen und Bauteile in industriellem ABSplus-Material geeignet ist. Dieser Drucker lässt sich über die Software GrabCAD Print direkt ansteuern, wodurch ein effizienter Workflow von der CAD-Erstellung bis zum fertigen Modell ermöglicht wird. Der uPrint SE Plus bietet eine maximale Baugröße von 203 x 203 x 152 mm und ist besonders für detailreiche, stabile Bauteile in kleinen Produktionsserien geeignet.
Ergänzend dazu steht ein Ender-5-Drucker zur Verfügung, der für kleinere Prototyping-Anwendungen ideal ist. Diese Kombination ermöglicht eine flexible Nutzung der 3D-Druckstation, von funktionalen Prototypen bis hin zu maßstabsgetreuen Modellen, und erleichtert den Studierenden die Erprobung neuer Designs und Fertigungsmethoden im kleinen Maßstab.

Künstliche Intelligenz
Beschreibung
KI-Modelle können in vielfältiger Weise in unterschiedliche Technologien integriert werden, die in intelligenten Fabriken zum Einsatz kommen. Mögliche Anwendungsbereiche umfassen die Vorhersage von Wartungsbedarfen im Rahmen von Predictive Maintenance, wodurch Ausfallzeiten minimiert und die Lebensdauer von Maschinen verlängert werden können. Ein weiterer wichtiger Bereich ist die Gewinnung von Informationen aus visuellen Daten, beispielsweise durch den Einsatz von Bildverarbeitungstechniken, die es ermöglichen, Qualitätskontrollen automatisiert und in Echtzeit durchzuführen. Darüber hinaus können KI-Modelle zur Steuerung von Robotern genutzt werden, indem sie präzise Anweisungen basierend auf visuellen oder sensorischen Eingaben geben. Die Steuerung von Robotern mittels Sprachmodellen stellt eine innovative Anwendung dar, bei der natürliche Sprachbefehle in konkrete Handlungen umgesetzt werden, was die Interaktion mit Maschinen intuitiver und benutzerfreundlicher gestaltet.
Um KI-Modelle effizient und effektiv zu trainieren, steht dem DFT-Labor entsprechende Hardware zur Verfügung. Dies ermöglicht es den Forschenden und Studierenden im DFT-Labor, KI-Algorithmen zu entwickeln und zu testen, um die genannten Anwendungen in intelligenten Fabriken zu realisieren und kontinuierlich zu verbessern.
Projekte
VERWEISE
Software
Beschreibung
Das DFT-Labor verfügt über verschiedene PLM-Software. Diese unterstützen komplexe Produktentwicklungs- und -managementprozesse, einschließlich der Verwaltung von Konstruktionsdaten, der Koordination von Produktänderungen und der Integration von Projektmanagementwerkzeugen. Diese Softwarelösungen ermöglichen die Überwachung verschiedener Entwicklungsstadien und stellen sicher, dass alle relevanten Informationen zentral zugänglich sind. Durch den Einsatz von PLM-Software ist das DFT-Labor in der Lage, den gesamten Produktlebenszyklus von der Konzeptphase bis zur Produktion und Wartung abzubilden und Optimierungspotenziale sowie Effizienzsteigerungen in der Produktentwicklung zu untersuchen. Schwerpunkte sind die Datenintegration verschiedener Systeme sowie Nachhaltigkeitsaspekte im PLM.
Insight Hub
Insight Hub ist eine IIoT-as-a-service Cloud, welche verschiedene Tools und Schnittstellen zur Integration, Analyse, Management und Überwachung industrieller IoT-Daten anbietet. Diese Plattform ermöglicht es Unternehmen, Daten von vernetzten Geräten und Sensoren in Echtzeit zu sammeln, zu verarbeiten und auszuwerten. Mit Insight Hubs können Nutzer fundierte Entscheidungen treffen, die Effizienz ihrer Betriebsabläufe steigern und proaktive Wartungsstrategien entwickeln. Hier steht außerdem das MindConnect IoT2040 zur Verfügung, welches als Gateway Daten aus verschiedenen Protokollen, wie OPC UA und S7 an Insight Hubs senden kann. Es können hiermit verschiedene Szenarien für die vertikale Integration von Daten umgesetzt werden.
Projekte

Teamcenter
Teamcenter, das weltweit am häufigsten genutzte PLM-System, steht ebenfalls dem DFT-Labor zur Verfügung. Es ermöglicht die Abbildung und den Test verschiedener Phasen des Produktlebenszyklus. Zudem wird es im Rahmen der Lehre eingesetzt, um Studierenden die Grundlagen von PLM-Systemen zu vermitteln. Die im Labor vorhandene Pocket-NC ist ebenfalls direkt in TeamCenter angebunden und kann als Test für Produktionsplanung eingesetzt werden.

NX
NX, eine leistungsstarke CAD/CAM/CAE-Software, steht ebenfalls dem DFT-Labor zur Verfügung. Sie ermöglicht die umfassende Modellierung, Simulation und Fertigungsplanung von Produkten. Zudem wird NX im Rahmen der Lehre eingesetzt, um Studierenden die Grundlagen und fortgeschrittene Techniken der Produktentwicklung und Fertigung zu vermitteln. Mit NX können verschiedene Aspekte des Produktdesigns und der -optimierung praktisch erlernt und getestet werden, was zur Vorbereitung auf reale Industrieanwendungen beiträgt. Außerdem ist NX in TeamCenter integriert, sodass die Erkenntnisse sich nahtlos in das umfassende PLM-System einfügen und den gesamten Produktlebenszyklus von der Konzeptentwicklung bis zur Produktion unterstützen.

Tecnomatix
Tecnomatix, eine Softwarelösung von Siemens, steht dem DFT-Labor zur Verfügung und ermöglicht die umfassende Modellierung und Simulation von Produktionsprozessen. Im Rahmen der Lehre wird die Software genutzt, um Studierenden die Grundlagen und fortgeschrittenen Techniken der Produktionsplanung und Fertigungssteuerung näherzubringen. Mit Tecnomatix können Aspekte der digitalen Fertigungsplanung, wie die Layoutplanung von Produktionslinien und die Simulation von Fertigungsabläufen, praxisnah erlernt und getestet werden. Diese Simulationen tragen zur Optimierung und Planung von Produktionsprozessen bei und bereiten Studierende auf reale Industrieanwendungen vor.
Enterprise Architect
Enterprise Architect von SparxSystems ist ebenfalls Teil des Softwareportfolios im DFT-Labor und wird für die Modellierung von Software- und Systemarchitekturen eingesetzt. Die Software bietet umfassende Funktionen zur UML-Modellierung und zur Verwaltung komplexer Entwicklungsprojekte. Im Rahmen der Lehre dient Enterprise Architect dazu, den Studierenden die Grundlagen des Systemdesigns, der Anforderungsanalyse und der Architekturentwicklung zu vermitteln. Mit Enterprise Architect können verschiedene Aspekte des modellbasierten Systementwurfs praktisch erlernt und getestet werden, was die Studierenden auf reale Projekte in der Software- und Systementwicklung vorbereitet.
Polarion
Polarion wird zur Planung, Verwaltung und Dokumentation von Softwareentwicklungsprojekten eingesetzt. Im Rahmen der Lehre wird das Tool eingesetzt, um den Studierenden die Grundlagen sowie fortgeschrittene Techniken des Software-Lebenszyklus-Managements zu vermitteln. Mit Polarion können verschiedene Aspekte des Anforderungsmanagements, der Qualitätskontrolle und der Projektplanung praktisch erlernt und getestet werden, was zur Vorbereitung auf reale Softwareentwicklungsprojekte beiträgt.

Extended Reality
Beschreibung
Extended Reality (XR) umfasst ein breites Spektrum von Technologien, die die Grenzen zwischen der physischen und der digitalen Welt verschwimmen lassen. Dazu zählen Augmented Reality (AR), Virtual Reality (VR) und Mixed Reality (MR). Diese Technologien bieten immersive Erlebnisse, die neue Möglichkeiten in Forschung und industriellen Anwendungen eröffnen.
Im DFT-Labor werden XR-Technologien gezielt auf ihre Eignung für industrielle Anwendungen untersucht. Augmented Reality (AR) erweitert die physische Welt durch digitale Informationen und visuelle Elemente, die in Echtzeit eingeblendet werden. Das Labor verfügt über eine HoloLens 2 von Microsoft sowie eine Oculus Rift, mit denen komplexe Produktionsprozesse visualisiert, Schulungen optimiert und die Mensch-Maschine-Interaktion verbessert werden können. Durch die Überlagerung digitaler Anweisungen und Daten auf reale Objekte wird die Arbeitseffizienz gesteigert und die Fehlerquote reduziert.
Die Anwendungen im DFT-Labor umfassen Projekte zur Entwicklung und Implementierung digitaler Zwillinge, zur MR-basierten Steuerung autonomer Systeme und zur Optimierung von Schulungsprozessen. Diese Projekte tragen zur Weiterentwicklung der Mensch-Maschine-Interaktion bei und fördern die Integration von XR-Technologien in industrielle Umgebungen.
Projekte
Bildquelle: [1]

Prototyping
Beschreibung
Das DFT-Labor stellt eine vielseitige Umgebung zur Entwicklung und Erprobung neuer Technologien und Konzepte bereit. Für die Realisierung von Prototypen oder Proof-of-Concepts stehen neben Raspberry Pis auch mehrere SPS-Steuerungen sowie diverse Sensorik zur Verfügung. Mithilfe von Prototyping können Anbindungen von Sensordaten an die Siemens Cloud zur Demonstration von vertikaler Integration, Predictive-Maintenance-Anwendungen, das Auslesen von Batteriedaten über ein Batteriemanagementsystem sowie die Nutzung eines Raspberry Pi als IoT-Gateway umgesetzt werden. Die vorhandene Infrastruktur ermöglicht die Durchführung von praxisnahen Experimenten sowie die Umsetzung innovativer Industrie-4.0-Anwendungen.
Projekte
VERWEISE