Projekte
Hier finden Sie eine Übersicht der Projekte, die im Rahmen des Digital Factory Technology Labors der Hochschule für Technik und Wirtschaft Berlin durchgeführt wurden. Unsere Studierenden und Forschenden arbeiten an innovativen Lösungen und kreativen Anwendungen im Bereich der digitalen Fertigungstechnologien. Entdecken Sie die Vielfalt und den Fortschritt unserer Projekte!
Für weitere Details, Informationen und Zugriffe kontaktieren Sie gerne einen unserer Ansprechpartner.
Seiteninhalt
Abschlussarbeiten
Energiedatenerfassung von Lithium-Ionen-Batterien eines fahrerlosen Transportsystems (MAV)
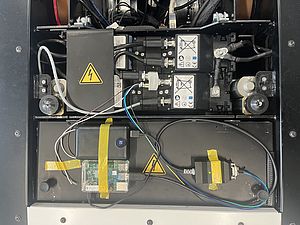
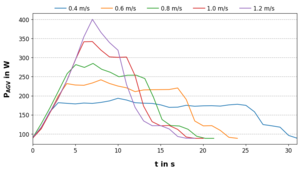
Die Integration fahrerloser Transportsysteme ist essenziell für nachhaltige und effiziente Intralogistik. Im Digital Factory Technology Lab der HTW Berlin wird das Automated Guided Vehicle (AGV) MAV der NEURA Robotics GmbH untersucht, um den innerbetrieblichen Materialfluss zu optimieren. Bewegungs- und Energiedaten des AGV wurden mit dem Datenerhebungssystem [Abb. 1] erfasst und analysiert, insbesondere der Energieverbrauch bei verschiedenen Fahrmanövern zur Fahrwegoptimierung [Videolink]. Die Analyse zeigt, dass segmentweise Beschleunigungen den Energiebedarf zunächst erhöhen, aber durch kürzere Fahrzeiten insgesamt zu einem geringeren Energieverbrauch führen [Abb. 2]. Große Kurvenradien werden empfohlen, um fahrdynamische Einschränkungen zu kompensieren. Die Erkenntnisse können auch auf andere Fahrstrecken und Lastentransporte des AGV im Labor angewendet werden, um den Energieverbrauch zu reduzieren.
Videolink:
mediathek.htw-berlin.de/video/neura-robotics-mav-battery-monitoring/51115d72af8537a58e19906a81e6eb3e
vertikale Integration von Maschinendaten in die IIoT Cloud Insight Hub
Die vertikale Integration von Maschinendaten in übergeordneten Systemen ist ein entscheidender Schritt zur verbesserten Datennutzung und Optimierung von Produktionsprozessen. Zur Demonstration wurden in einem Abschlussprojekt die Daten eines Roboterarms in die IIoT Cloud Insight Hub integriert. Hierfür wurde im Rahmen eines Abschlussprojekts ein Datenmodell entwickelt, welches die Daten und Funktionen des Franka Emika Research Roboters abbildet. Dieses wurde anschließend in einen OPC UA-Server integriert und zur Modellierung des digitalen Zwillings in der Cloud verwendet. Um die Maschienendaten vom OPC UA Server in die Cloud zu senden wurde ein Edge Device, das als IoT-Gateway dient, verwendet. Abschließend wurden die Datenpunkte vom OPC UA-Server zu den Datenpunkten des digitalen Zwillings in Insight Hub gemappt. Durch die Umsetzung der vertikalen Integration können die Daten in der Cloud gesammelt, überwacht, Analysiert und leicht erreichbar gemacht werden. Mit Hilfe von Dashboards wurden die integrierten Daten visualisiert [Abb. 1]. Die gesammelten Daten können beispielsweise zur Ermittlung von KPIs wie Up- und Downtime, Auslastung und Ausfallzeitrate verwendet werden.
Entwicklung einer visuell gesteuerten und autonomen Pick-and-Place-Anwendung
Im Rahmen eines Masterprojekts wurde im DFT-Labor eine autonome Pick-and-Place-Anwendung für den Franka Emika Research Roboter entwickelt. Ziel dieses Projekts war es, mithilfe von Bildverarbeitung und Künstlicher Intelligenz Objekte in der Arbeitsumgebung zu erkennen, zu lokalisieren und gezielt zu handhaben. Eine Eye-in-Hand-Kamerainstallation diente dabei zur Erfassung visueller Daten, die zur Steuerung des Roboters verwendet wurden. Der entwickelte Prototyp ermöglichte es dem Roboter, Objekte zu greifen und in einen weiteren Prozessschritt zu transportieren. Dabei kamen fortschrittliche KI-Modelle zur Anwendung, um die Position und Lage der Objekte zu bestimmen.
Studienprojekte
MAViA - MAV HoloLens 2 Integration
In diesem Projekt wird untersucht, wie ein Multi-Sensing Autonomous Vehicle (MAV) der Firma NEURA Robotics mit der Microsoft HoloLens 2 verbunden und gesteuert werden kann.
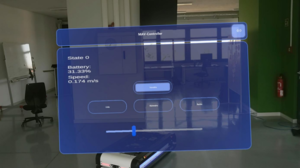
Dazu wurde eine innovative Unity-App für die HoloLens entwickelt, die es ermöglicht, Daten des MAVs in Echtzeit darzustellen, die Geschwindigkeit zu regulieren und das Fahrzeug mittels einfacher Tastenbefehle zu steuern [Abb. 1]. Ein zentrales Element des Projekts ist ein speziell entwickeltes Skript, das die Webseite des MAVs emuliert, welche im Netzwerk des MAVs zugänglich ist. Dieses Skript übersetzt die Befehle der App in entsprechende Web-API-Kommandos, wodurch eine nahtlose Interaktion zwischen der HoloLens und dem MAV gewährleistet wird. Dank dieser Lösung kann der MAV schnell und intuitiv über eine benutzerfreundliche Oberfläche zu verschiedenen Standorten navigiert werden. Die Kombination modernster Technologien von NEURA Robotics und Microsoft HoloLens 2 bietet vielversprechende Möglichkeiten für die Zukunft autonomer Fahrzeugsteuerung und erweitert die Anwendungsbereiche im industriellen und kommerziellen Sektor erheblich.
Videolink:
mediathek.htw-berlin.de/m/010b7fa045732cc1d4e038f8ba53bbc20c1c0fb4db934fc27fe03dea1b2f31f430332ce7f7c64564998e79841cecb3cbfa22c8ac8dce3c7aaad93298dd7d2ad7
Forschungsprojekte
Funktionsorientiertes Komplexitätsmanagement in allen Phasen der Produktentstehung (FuPEP)
Das Forschungsprojekt „Funktionsorientiertes Komplexitätsmanagement in allen Phasen der Produktentstehung (FuPEP)“ adressierte die Herausforderungen der zunehmenden Komplexität in der Produktentwicklung und -produktion, insbesondere bei kleinen und mittleren Unternehmen (KMU).
FuPEP entwickelte ein Assistenzsystem, das die strukturelle Produkt- und Prozesskomplexität visualisiert und beherrschbar macht. Das System stellte die Zusammenhänge zwischen Bauteilfunktionen, insbesondere Softwarefunktionen, und Produktionsprozessen dar, um Komplexitätsreduzierungsmaßnahmen abzuleiten. Ziel war die Erstellung eines Demonstrator-Assistenzsystems und dessen Validierung anhand repräsentativer Anwendungsfälle. Zudem erarbeitete das Projekt Empfehlungen für eine agile Aufbau- und Ablauforganisation sowie ein Lehr- und Lernkonzept für das betriebliche Komplexitätsmanagement.
Das Projekt wurde vom Bundesministerium für Bildung und Forschung (BMBF) gefördert und lief vom 01.10.2020 bis zum 30.09.2023. Zu den Kooperationspartnern zählten unter anderem die Leichtwerk Research GmbH, LMtec GmbH, Phoenix Contact GmbH & Co. KG und die Technische Hochschule Ostwestfalen-Lippe.
Weiterführende Informationen...
Innovation Evidenzbasierte Praxis (IN-EbP)
Das Forschungsprojekt „Innovation Evidenzbasierte Praxis (IN-EbP)“ zielt darauf ab, die Umsetzung evidenzbasierter Therapien in die physiotherapeutische Praxis durch einen partizipativen Ansatz zu verbessern.
Evidenzbasierung in der Physiotherapie, besonders unter Berücksichtigung der bio-psycho-sozialen Lebenswelt der Patienten, stellt eine beträchtliche Herausforderung dar. Es gibt zahlreiche Diffusionsbarrieren, die die Implementierung neuer wissenschaftlicher Erkenntnisse in der Praxis erschweren. Das Projekt, gefördert vom IFAF Berlin, untersucht diese spezifischen Probleme und entwickelt eine Software, die Therapeuten, sowohl akademisierte als auch nicht akademisierte, bei der leitliniengerechten Diagnostik und Therapie von chronischem Rückenschmerz unterstützt.
Diese Software soll intuitiv und intelligent durch den therapeutischen Prozess führen und letztlich die evidenzbasierte physiotherapeutische Arbeit verbessern. Projektlaufzeit ist vom 01.10.2022 bis zum 30.09.2024. Das Projekt wird mit Unterstützung des IFAF Berlin sowie in Zusammenarbeit mit Partnern wie der Alice Salomon Hochschule Berlin, EUPaRS, dem Klinikum rechts der Isar, PhysioBib und Therapiepunkt durchgeführt.N-EbP
Weiterführende Informationen ...